![]()

Tutorial 1: Reinforcement Learning For Games#
Week 3, Day 5: Learning to Play Games & DL Thinking 3
By Neuromatch Academy
Content creators: Mandana Samiei, Raymond Chua, Kushaan Gupta, Tim Lilicrap, Blake Richards
Content reviewers: Arush Tagade, Lily Cheng, Melvin Selim Atay, Kelson Shilling-Scrivo
Content editors: Melvin Selim Atay, Spiros Chavlis, Gunnar Blohm
Production editors: Namrata Bafna, Gagana B, Spiros Chavlis
Tutorial Objectives#
In this tutorial, you will learn how to implement a game loop, create a random player, and improve the performance of player using different reinforcement learning methods.
The specific objectives for this tutorial:
Understand the format of two-players games, Othello specifically
Understand how to create random players
Understand how to implement a value-based player
Understand how to implement a policy-based player
Understand how to implement a player with Monte Carlo planner
Setup#
Install dependencies#
Show code cell source
# @title Install dependencies
!pip install coloredlogs --quiet
Install and import feedback gadget#
Show code cell source
# @title Install and import feedback gadget
!pip3 install vibecheck datatops --quiet
from vibecheck import DatatopsContentReviewContainer
def content_review(notebook_section: str):
return DatatopsContentReviewContainer(
"", # No text prompt
notebook_section,
{
"url": "https://pmyvdlilci.execute-api.us-east-1.amazonaws.com/klab",
"name": "neuromatch_dl",
"user_key": "f379rz8y",
},
).render()
feedback_prefix = "W3D5_T1"
# Imports
import os
import time
import random
import logging
import coloredlogs
import numpy as np
import torch
import torch.optim as optim
import torch.nn as nn
import torch.nn.functional as F
from tqdm.notebook import tqdm
from pickle import Unpickler
log = logging.getLogger(__name__)
coloredlogs.install(level='INFO') # Change this to DEBUG to see more info.
Helper functions#
Show code cell source
# @title Helper functions
def loadTrainExamples(folder, filename):
"""
Helper function to load training examples
Args:
folder: string
Path specifying training examples
filename: string
File name of training examples
Returns:
trainExamplesHistory: list
Returns examples based on the model were already collected (loaded)
"""
trainExamplesHistory = []
modelFile = os.path.join(folder, filename)
examplesFile = modelFile + ".examples"
if not os.path.isfile(examplesFile):
print(f'File "{examplesFile}" with trainExamples not found!')
r = input("Continue? [y|n]")
if r != "y":
sys.exit()
else:
print("File with train examples found. Loading it...")
with open(examplesFile, "rb") as f:
trainExamplesHistory = Unpickler(f).load()
print('Loading done!')
return trainExamplesHistory
def save_model_checkpoint(folder, filename, nnet):
filepath = os.path.join(folder, filename)
if not os.path.exists(folder):
print(f"Checkpoint Directory does not exist! Making directory {folder}")
os.mkdir(folder)
else:
print("Checkpoint Directory exists!")
torch.save({'state_dict': nnet.state_dict()}, filepath)
print("Model saved!")
def load_model_checkpoint(folder, filename, nnet, device):
filepath = os.path.join(folder, filename)
if not os.path.exists(filepath):
raise FileNotFoundError(f"No model in path {filepath}")
checkpoint = torch.load(filepath, map_location=device)
nnet.load_state_dict(checkpoint['state_dict'])
Set random seed#
Executing set_seed(seed=seed) you are setting the seed
Show code cell source
# @title Set random seed
# @markdown Executing `set_seed(seed=seed)` you are setting the seed
# For DL its critical to set the random seed so that students can have a
# baseline to compare their results to expected results.
# Read more here: https://pytorch.org/docs/stable/notes/randomness.html
# Call `set_seed` function in the exercises to ensure reproducibility.
def set_seed(seed=None, seed_torch=True):
"""
Function that controls randomness. NumPy and random modules must be imported.
Args:
seed : Integer
A non-negative integer that defines the random state. Default is `None`.
seed_torch : Boolean
If `True` sets the random seed for pytorch tensors, so pytorch module
must be imported. Default is `True`.
Returns:
Nothing.
"""
if seed is None:
seed = np.random.choice(2 ** 32)
random.seed(seed)
np.random.seed(seed)
if seed_torch:
torch.manual_seed(seed)
torch.cuda.manual_seed_all(seed)
torch.cuda.manual_seed(seed)
torch.backends.cudnn.benchmark = False
torch.backends.cudnn.deterministic = True
print(f'Random seed {seed} has been set.')
# In case that `DataLoader` is used
def seed_worker(worker_id):
"""
DataLoader will reseed workers following randomness in
multi-process data loading algorithm.
Args:
worker_id: integer
ID of subprocess to seed. 0 means that
the data will be loaded in the main process
Refer: https://pytorch.org/docs/stable/data.html#data-loading-randomness for more details
Returns:
Nothing
"""
worker_seed = torch.initial_seed() % 2**32
np.random.seed(worker_seed)
random.seed(worker_seed)
Set device (GPU or CPU). Execute set_device()#
Show code cell source
# @title Set device (GPU or CPU). Execute `set_device()`
# especially if torch modules used.
# Inform the user if the notebook uses GPU or CPU.
def set_device():
"""
Set the device. CUDA if available, CPU otherwise
Args:
None
Returns:
Nothing
"""
device = "cuda" if torch.cuda.is_available() else "cpu"
if device != "cuda":
print("WARNING: For this notebook to perform best, "
"if possible, in the menu under `Runtime` -> "
"`Change runtime type.` select `GPU` ")
else:
print("GPU is enabled in this notebook. \n"
"If you want to disable it, in the menu under `Runtime` -> \n"
"`Hardware accelerator.` and select `None` from the dropdown menu")
return device
SEED = 2023
set_seed(seed=SEED)
DEVICE = set_device()
Random seed 2023 has been set.
WARNING: For this notebook to perform best, if possible, in the menu under `Runtime` -> `Change runtime type.` select `GPU`
Download the modules#
Show code cell source
# @title Download the modules
# @markdown Run this cell!
# @markdown Download from OSF. The original repo is https://github.com/raymondchua/nma_rl_games.git
import os, io, sys, shutil, zipfile
from urllib.request import urlopen
# download from github repo directly
#!git clone git://github.com/raymondchua/nma_rl_games.git --quiet
REPO_PATH = 'nma_rl_games'
if not os.path.exists(REPO_PATH):
download_string = "Downloading"
zipurl = 'https://osf.io/kf4p9/download'
print(f"{download_string} and unzipping the file... Please wait.")
with urlopen(zipurl) as zipresp:
with zipfile.ZipFile(io.BytesIO(zipresp.read())) as zfile:
zfile.extractall()
print("Download completed.")
# add the repo in the path
sys.path.append('nma_rl_games/alpha-zero')
print(f"Added the {REPO_PATH} in the path and imported the modules.")
# @markdown Import modules designed for use in this notebook
import Arena
from utils import *
from Game import Game
from MCTS import MCTS
from NeuralNet import NeuralNet
# from othello.OthelloPlayers import *
from othello.OthelloLogic import Board
# from othello.OthelloGame import OthelloGame
from othello.pytorch.NNet import NNetWrapper as NNet
Downloading and unzipping the file... Please wait.
---------------------------------------------------------------------------
HTTPError Traceback (most recent call last)
Cell In[9], line 18
16 zipurl = 'https://osf.io/kf4p9/download'
17 print(f"{download_string} and unzipping the file... Please wait.")
---> 18 with urlopen(zipurl) as zipresp:
19 with zipfile.ZipFile(io.BytesIO(zipresp.read())) as zfile:
20 zfile.extractall()
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:214, in urlopen(url, data, timeout, cafile, capath, cadefault, context)
212 else:
213 opener = _opener
--> 214 return opener.open(url, data, timeout)
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:523, in OpenerDirector.open(self, fullurl, data, timeout)
521 for processor in self.process_response.get(protocol, []):
522 meth = getattr(processor, meth_name)
--> 523 response = meth(req, response)
525 return response
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:632, in HTTPErrorProcessor.http_response(self, request, response)
629 # According to RFC 2616, "2xx" code indicates that the client's
630 # request was successfully received, understood, and accepted.
631 if not (200 <= code < 300):
--> 632 response = self.parent.error(
633 'http', request, response, code, msg, hdrs)
635 return response
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:555, in OpenerDirector.error(self, proto, *args)
553 http_err = 0
554 args = (dict, proto, meth_name) + args
--> 555 result = self._call_chain(*args)
556 if result:
557 return result
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:494, in OpenerDirector._call_chain(self, chain, kind, meth_name, *args)
492 for handler in handlers:
493 func = getattr(handler, meth_name)
--> 494 result = func(*args)
495 if result is not None:
496 return result
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:747, in HTTPRedirectHandler.http_error_302(self, req, fp, code, msg, headers)
744 fp.read()
745 fp.close()
--> 747 return self.parent.open(new, timeout=req.timeout)
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:523, in OpenerDirector.open(self, fullurl, data, timeout)
521 for processor in self.process_response.get(protocol, []):
522 meth = getattr(processor, meth_name)
--> 523 response = meth(req, response)
525 return response
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:632, in HTTPErrorProcessor.http_response(self, request, response)
629 # According to RFC 2616, "2xx" code indicates that the client's
630 # request was successfully received, understood, and accepted.
631 if not (200 <= code < 300):
--> 632 response = self.parent.error(
633 'http', request, response, code, msg, hdrs)
635 return response
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:561, in OpenerDirector.error(self, proto, *args)
559 if http_err:
560 args = (dict, 'default', 'http_error_default') + orig_args
--> 561 return self._call_chain(*args)
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:494, in OpenerDirector._call_chain(self, chain, kind, meth_name, *args)
492 for handler in handlers:
493 func = getattr(handler, meth_name)
--> 494 result = func(*args)
495 if result is not None:
496 return result
File /opt/hostedtoolcache/Python/3.9.25/x64/lib/python3.9/urllib/request.py:641, in HTTPDefaultErrorHandler.http_error_default(self, req, fp, code, msg, hdrs)
640 def http_error_default(self, req, fp, code, msg, hdrs):
--> 641 raise HTTPError(req.full_url, code, msg, hdrs, fp)
HTTPError: HTTP Error 308: Permanent Redirect
The hyperparameters used throughout the notebook.
args = dotdict({
'numIters': 1, # In training, number of iterations = 1000 and num of episodes = 100
'numEps': 1, # Number of complete self-play games to simulate during a new iteration.
'tempThreshold': 15, # To control exploration and exploitation
'updateThreshold': 0.6, # During arena playoff, new neural net will be accepted if threshold or more of games are won.
'maxlenOfQueue': 200, # Number of game examples to train the neural networks.
'numMCTSSims': 15, # Number of games moves for MCTS to simulate.
'arenaCompare': 10, # Number of games to play during arena play to determine if new net will be accepted.
'cpuct': 1,
'maxDepth': 5, # Maximum number of rollouts
'numMCsims': 5, # Number of monte carlo simulations
'mc_topk': 3, # Top k actions for monte carlo rollout
'checkpoint': './temp/',
'load_model': False,
'load_folder_file': ('/dev/models/8x100x50','best.pth.tar'),
'numItersForTrainExamplesHistory': 20,
# Define neural network arguments
'lr': 0.001, # lr: Learning Rate
'dropout': 0.3,
'epochs': 10,
'batch_size': 64,
'device': DEVICE,
'num_channels': 512,
})
Section 0: Introduction#
Video 0: Introduction#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Introduction_Video")
Section 1: Create a game/agent loop for RL#
Time estimate: ~15 mins
Video 1: A game loop for RL#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_A_game_loop_for_RL_Video")
Section 1.1: Introduction to OthelloGame#
Othello is a board game played by two players on a board of 64 squares arranged in an eight-by-eight grid, with 64 playing pieces that are black on one side and white on the other.
Setup: The board will start with 2 black discs and 2 white discs at the centre of the board. They are arranged with black forming a North-East to South-West direction. White is forming a North-West to South-East direction. Each player gets 32 discs and black always starts the game.
Game rules:
Players take turns placing a single disk at a time.
A move is made by placing a disc of the player’s color on the board to surround (i.e. “outflank”) discs of the opposite color. In other words, the player with black discs must place on so that there is a straight line between the newly placed disc and another black disc, with one or more white pieces between them.
Surrounded disks get flipped (i.e. change color).
If a player does not have a valid move (they cannot place their disc to outflank the oppponent’s discs), they pass on their turn
A player can not voluntarily forfeit his turn.
When both players can not make a valid move the game ends.
If you’re interested, you can explore this website, https://www.eothello.com/, where you will find a collection of useful rules and diagrams. Additionally, you can even play a sample Othello game on the site if you wish!
Note: we will use a 6x6 board to speed computations up
Goal: Setup a game environment with multiple players for reinforcement learning experiments.
Exercise:
Build an agent that plays random moves
Make agents play games and compute wins and losses
Execute the following code to enable the OthelloGame class. This class represents a game board and has methods such getInitBoard to create the intial board, getValidMove to return the options of valid moves, and other helpful functionality to play the game. You do not need to understand every line of code in this tutorial, but try to develop an intuitive understanding of the methods.
class OthelloGame(Game):
"""
Othello game board
"""
square_content = {
-1: "X",
+0: "-",
+1: "O"
}
@staticmethod
def getSquarePiece(piece):
return OthelloGame.square_content[piece]
def __init__(self, n):
self.n = n
def getInitBoard(self):
b = Board(self.n)
return np.array(b.pieces)
def getBoardSize(self):
return (self.n, self.n)
def getActionSize(self):
# Return number of actions, n is the board size and +1 is for no-op action
return self.n * self.n + 1
def getCanonicalForm(self, board, player):
# Return state if player==1, else return -state if player==-1
return player * board
def stringRepresentation(self, board):
return board.tobytes()
def stringRepresentationReadable(self, board):
board_s = "".join(self.square_content[square] for row in board for square in row)
return board_s
def getScore(self, board, player):
b = Board(self.n)
b.pieces = np.copy(board)
return b.countDiff(player)
@staticmethod
def display(board):
n = board.shape[0]
print(" ", end="")
for y in range(n):
print(y, end=" ")
print("")
print("-----------------------")
for y in range(n):
print(y, "|", end="") # Print the row
for x in range(n):
piece = board[y][x] # Get the piece to print
print(OthelloGame.square_content[piece], end=" ")
print("|")
print("-----------------------")
@staticmethod
def displayValidMoves(moves):
A=np.reshape(moves[0:-1], board.shape)
n = board.shape[0]
print(" ")
print("possible moves")
print(" ", end="")
for y in range(n):
print(y, end=" ")
print("")
print("-----------------------")
for y in range(n):
print(y, "|", end="") # Print the row
for x in range(n):
piece = A[y][x] # Get the piece to print
print(OthelloGame.square_content[piece], end=" ")
print("|")
print("-----------------------")
def getNextState(self, board, player, action):
"""
Make valid move. If player takes action on board, return next (board,player)
and action must be a valid move
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
player: Integer
ID of current player
action: np.ndarray
Space of actions
Returns:
(board, player): tuple
Next state representation
"""
if action == self.n*self.n:
return (board, -player)
b = Board(self.n)
b.pieces = np.copy(board)
move = (int(action/self.n), action%self.n)
b.execute_move(move, player)
return (b.pieces, -player)
def getValidMoves(self, board, player):
"""
Get all valid moves for player
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
player: Integer
ID of current player
action: np.ndarray
Space of action
Returns:
valids: np.ndarray
Valid moves for player
"""
valids = [0]*self.getActionSize()
b = Board(self.n)
b.pieces = np.copy(board)
legalMoves = b.get_legal_moves(player)
if len(legalMoves)==0:
valids[-1]=1
return np.array(valids)
for x, y in legalMoves:
valids[self.n*x+y]=1
return np.array(valids)
def getGameEnded(self, board, player):
"""
Check if game ended
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
player: Integer
ID of current player
Returns:
0 if not ended, 1 if player 1 won, -1 if player 1 lost
"""
b = Board(self.n)
b.pieces = np.copy(board)
if b.has_legal_moves(player):
return 0
if b.has_legal_moves(-player):
return 0
if b.countDiff(player) > 0:
return 1
return -1
def getSymmetries(self, board, pi):
"""
Get mirror/rotational configurations of board
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
pi: np.ndarray
Dimension of board
Returns:
l: list
90 degree of board, 90 degree of pi_board
"""
assert(len(pi) == self.n**2+1) # 1 for pass
pi_board = np.reshape(pi[:-1], (self.n, self.n))
l = []
for i in range(1, 5):
for j in [True, False]:
newB = np.rot90(board, i)
newPi = np.rot90(pi_board, i)
if j:
newB = np.fliplr(newB)
newPi = np.fliplr(newPi)
l += [(newB, list(newPi.ravel()) + [pi[-1]])]
return l
Below, we initialize and view a board.
# Set up the game
game = OthelloGame(6)
# Get the initial board
board = game.getInitBoard()
# Display the board
game.display(board)
# Observe the game board size
print(f'Board size = {game.getBoardSize()}')
# Observe the action size
print(f'Action size = {game.getActionSize()}')
Now let’s look at the valid actions for player 1 (the circles) and compare the valid actions to the board above.
# Get valid moves
valids = game.getValidMoves(board, 1)
print(valids)
# Visualize the moves
game.displayValidMoves(valids)
game.getValidMoves returns 1s and 0s for every position on the board, 1 indicates if it is a valid place to put a new disc. Note that it turns a list (this could be reshaped into the board shape).
We also have a method to visualize the valid actions on the board.
Section 1.2: Create a random player#
Let’s start by setting up the game loop using a random player to start with so that we we can test the game loop and make sure it works correctly.
To do so, we will first implement a random player in 3 steps:
determine which moves are possible at all
assign a uniform probability to each more (remember, this is a random player): 1/N for N valid moves
randomly choose a move from the possible moves
Coding Exercise 1.2: Implement a random player#
class RandomPlayer():
def __init__(self, game):
self.game = game
def play(self, board):
"""
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
Returns:
a: int
Randomly chosen move
"""
#################################################
## TODO for students: ##
## 1. Please compute the valid moves using getValidMoves() and the game class self.game. ##
## 2. Compute the probability over actions.##
## 3. Pick a random action based on the probability computed above.##
# Fill out function and remove ##
raise NotImplementedError("Implement the random player")
#################################################
# Compute the valid moves using getValidMoves()
valids = ...
# Compute the probability of each move being played (random player means
# this should be uniform for valid moves, 0 for others)
prob = ...
# Pick a random action based on the probabilities (hint: np.choice is useful)
a = ...
return a
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_a_Random_Player_Excercise")
Section 1.3: Compete random agents#
Now we create 2 random players and let them play against one another for a number of times… We will use some nice functionality we imported above, including the Arena class that allows multiple game plays. You can check out the code here if you want, but it is not necessary: https://github.com/raymondchua/nma_rl_games
# Define the random players
player1 = RandomPlayer(game).play # note the .play here to pass a function to Arena!
player2 = RandomPlayer(game).play
# Define number of games
num_games = 20
# Start the competition
set_seed(seed=SEED)
arena = Arena.Arena(player1, player2, game, display=None) # To see the steps of the competition set "display=OthelloGame.display"
result = arena.playGames(num_games, verbose=False) # returns (Number of player1 wins, number of player2 wins, number of ties)
# Compute win rate for the random player (player 1)
print(f"\nNumber of games won by player1 = {result[0]}, "
f"Number of games won by player2 = {result[1]} out of {num_games} games")
win_rate_player1 = result[0]/num_games
print(f"\nWin rate for player1 over 20 games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 13, Number of games won by player2 = 7 out of 20 games
Win rate for player1 over 20 games: 65.0%
Note: the random player is purely policy-based. It contains no estimates of value. Next we’ll see how to estimate and use value functions for game playing.
Section 2: Train a value function from expert game data#
Time estimate: ~35 mins
Now that we have the game set up and working, we can build a (hopefully) smarter player by learning a value function using expert game data. Our player can then use this value function to decide what moves to make.
Goal: Learn how to train a value function from a dataset of games played by an expert.
Exercise:
Load a dataset of expert generated games.
Train a network to minimize MSE for win/loss predictions given board states sampled throughout the game. This will be done on a very small number of games. We will provide a network trained on a larger dataset.
Learn how to use a value function in order to make a player that works better than a random player.
Video 2: Train a value function#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Train_a_Value_Function_Video")
Section 2.1: Load expert data#
path = "nma_rl_games/alpha-zero/pretrained_models/data/"
loaded_games = loadTrainExamples(folder=path, filename='checkpoint_1.pth.tar')
Section 2.2: Define the Neural Network Architecture for Othello#
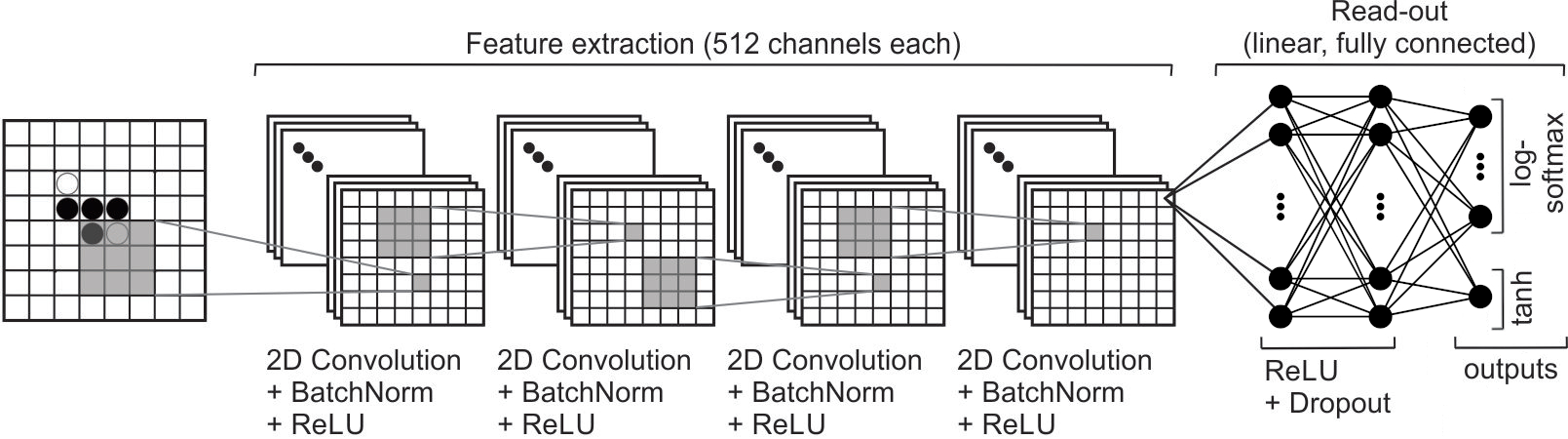
We will (somewhat arbitrarily) use a deep CNN with 4 convolutional layers and 4 linear layers with ReLU transfer functions and batch normalization. One reason why convolutions are interesting here is because they can extract the local value of moves on the board regardless of board position; convolution would thus be able to extract the translation-invariant aspects of the play.
For the Value Network network, the 3rd linear layer represents the policy and the 4th linear layer (output) represents the value function. The value function is a weighted sum over all policies.
We can do this by assuming that the weights between linear layers 3 and 4 approximate the value-action function \(w_{l_{34}}=Q^{\pi}(s,a)\) in:
Note: OthelloNet has 2 outputs:
log-softmax of linear layer 3
tanh of linear layer 4
Coding Exercise 2.2: Implement OthelloNNet for playing Othello#
We implement most of OthelloNNet below but please complete the code to get the final outputs
class OthelloNNet(nn.Module):
def __init__(self, game, args):
"""
Initialise game parameters
Args:
game: OthelloGame instance
Instance of the OthelloGame class above;
args: dictionary
Instantiates number of iterations and episodes, controls temperature threshold, queue length,
arena, checkpointing, and neural network parameters:
learning-rate: 0.001, dropout: 0.3, epochs: 10, batch_size: 64,
num_channels: 512
"""
self.board_x, self.board_y = game.getBoardSize()
self.action_size = game.getActionSize()
self.args = args
super(OthelloNNet, self).__init__()
self.conv1 = nn.Conv2d(in_channels=1, out_channels=args.num_channels,
kernel_size=3, stride=1, padding=1)
self.conv2 = nn.Conv2d(in_channels=args.num_channels,
out_channels=args.num_channels, kernel_size=3,
stride=1, padding=1)
self.conv3 = nn.Conv2d(in_channels=args.num_channels,
out_channels=args.num_channels, kernel_size=3,
stride=1)
self.conv4 = nn.Conv2d(in_channels=args.num_channels,
out_channels=args.num_channels, kernel_size=3,
stride=1)
self.bn1 = nn.BatchNorm2d(num_features=args.num_channels)
self.bn2 = nn.BatchNorm2d(num_features=args.num_channels)
self.bn3 = nn.BatchNorm2d(num_features=args.num_channels)
self.bn4 = nn.BatchNorm2d(num_features=args.num_channels)
self.fc1 = nn.Linear(in_features=args.num_channels * (self.board_x - 4) * (self.board_y - 4),
out_features=1024)
self.fc_bn1 = nn.BatchNorm1d(num_features=1024)
self.fc2 = nn.Linear(in_features=1024, out_features=512)
self.fc_bn2 = nn.BatchNorm1d(num_features=512)
self.fc3 = nn.Linear(in_features=512, out_features=self.action_size)
self.fc4 = nn.Linear(in_features=512, out_features=1)
def forward(self, s):
"""
Args:
s: np.ndarray
Array of size (batch_size x board_x x board_y)
Returns:
prob, v: tuple of torch.Tensor
Probability distribution over actions at the current state and the value
of the current state.
"""
s = s.view(-1, 1, self.board_x, self.board_y) # batch_size x 1 x board_x x board_y
s = F.relu(self.bn1(self.conv1(s))) # batch_size x num_channels x board_x x board_y
s = F.relu(self.bn2(self.conv2(s))) # batch_size x num_channels x board_x x board_y
s = F.relu(self.bn3(self.conv3(s))) # batch_size x num_channels x (board_x-2) x (board_y-2)
s = F.relu(self.bn4(self.conv4(s))) # batch_size x num_channels x (board_x-4) x (board_y-4)
s = s.view(-1, self.args.num_channels * (self.board_x - 4) * (self.board_y - 4))
s = F.dropout(F.relu(self.fc_bn1(self.fc1(s))), p=self.args.dropout, training=self.training) # batch_size x 1024
s = F.dropout(F.relu(self.fc_bn2(self.fc2(s))), p=self.args.dropout, training=self.training) # batch_size x 512
pi = self.fc3(s) # batch_size x action_size
v = self.fc4(s) # batch_size x 1
#################################################
## TODO for students: Compute the outputs of OthelloNNet in this order
# 1. Log softmax of linear layer 3
# 2. tanh of linear layer 4
# Fill out function and remove
raise NotImplementedError("Calculate the probability distribution and the value")
#################################################
# Returns probability distribution over actions at the current state and the value of the current state.
return ..., ...
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_OtheloNN_Excercise")
Section 2.3: Define the Value network#
Next we need to implement the training of the network we created above. We want to train it to approximate the value function - we will use real examples (the expert data from above) to train it. So we need to specify the standard initialization, training, prediction and loss functions.
Coding Exercise 2.3: Implement the ValueNetwork#
class ValueNetwork(NeuralNet):
def __init__(self, game):
"""
Args:
game: OthelloGame
Instance of the OthelloGame class above
"""
self.nnet = OthelloNNet(game, args)
self.board_x, self.board_y = game.getBoardSize()
self.action_size = game.getActionSize()
self.nnet.to(args.device)
def train(self, games):
"""
Args:
games: list
List of examples with each example is of form (board, pi, v)
"""
optimizer = optim.Adam(self.nnet.parameters())
for examples in games:
for epoch in range(args.epochs):
print('EPOCH ::: ' + str(epoch + 1))
self.nnet.train()
v_losses = [] # To store the losses per epoch
batch_count = int(len(examples) / args.batch_size) # len(examples)=200, batch-size=64, batch_count=3
t = tqdm(range(batch_count), desc='Training Value Network')
for _ in t:
sample_ids = np.random.randint(len(examples), size=args.batch_size) # Read the ground truth information from MCTS simulation using the loaded examples
boards, pis, vs = list(zip(*[examples[i] for i in sample_ids])) # Length of boards, pis, vis = 64
boards = torch.FloatTensor(np.array(boards).astype(np.float64))
target_vs = torch.FloatTensor(np.array(vs).astype(np.float64))
# Predict
# To run on GPU if available
boards, target_vs = boards.contiguous().to(args.device), target_vs.contiguous().to(args.device)
#################################################
## TODO for students:
# 1. Compute the value predicted by OthelloNNet()
# 2. First implement the loss_v() function below and then use it to update the value loss. ##
# Fill out function and remove
raise NotImplementedError("Compute the output")
#################################################
# Compute output
_, out_v = ...
l_v = ... # Total loss
# Record loss
v_losses.append(l_v.item())
t.set_postfix(Loss_v=l_v.item())
# Compute gradient and do SGD step
optimizer.zero_grad()
l_v.backward()
optimizer.step()
def predict(self, board):
"""
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
Returns:
v: OthelloNet instance
Data of the OthelloNet class instance above;
"""
# Timing
start = time.time()
# Preparing input
board = torch.FloatTensor(board.astype(np.float64))
board = board.contiguous().to(args.device)
board = board.view(1, self.board_x, self.board_y)
self.nnet.eval()
with torch.no_grad():
_, v = self.nnet(board)
return v.data.cpu().numpy()[0]
def loss_v(self, targets, outputs):
"""
Calculates mean squared error
Args:
targets: np.ndarray
Ground Truth variables corresponding to input
outputs: np.ndarray
Predictions of Network
Returns:
MSE loss averaged across the whole dataset
"""
#################################################
## TODO for students: Please compute Mean squared error and return as output. ##
# Fill out function and remove
raise NotImplementedError("Calculate the loss")
#################################################
# Mean squared error (MSE)
return ...
def save_checkpoint(self, folder='checkpoint', filename='checkpoint.pth.tar'):
save_model_checkpoint(folder, filename, self.nnet)
def load_checkpoint(self, folder='checkpoint', filename='checkpoint.pth.tar'):
load_model_checkpoint(folder, filename, self.nnet, args.device)
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_the_Value_Network_Excercise")
Section 2.4: Train the value network and observe the MSE loss progress#
Important: Following cell will train the value network if you do not have access to the pretrained models in the rl_for_games repository.
It will take a while to complete so we recommend using the fully trained value network provided in the rl_for_games repository that will be automatically loaded later below.
if not os.listdir('nma_rl_games/alpha-zero/pretrained_models/models/'):
set_seed(seed=SEED)
game = OthelloGame(6)
vnet = ValueNetwork(game)
vnet.train(loaded_games)
---------------------------------------------------------------------------
FileNotFoundError Traceback (most recent call last)
Cell In[28], line 1
----> 1 if not os.listdir('nma_rl_games/alpha-zero/pretrained_models/models/'):
2 set_seed(seed=SEED)
3 game = OthelloGame(6)
FileNotFoundError: [Errno 2] No such file or directory: 'nma_rl_games/alpha-zero/pretrained_models/models/'
Section 2.5: Use a trained value network to play games#
Now that we have our value network all set up and trained, we’re ready to test it by using it to play games.
Video 3: Play games using a value function#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Play_games_using_a_value_function_Video")
Coding Exercise 2.5: Implement the Value-based player#
Exercise:
Sample random valid moves and use the value function to rank them
Choose the best move as the action and play it Show that doing so beats the random player
Hint: You might need to change the sign of the value based on the player.
Let’s first initialize a new game and load in a pre-trained Value network.
model_save_name = 'ValueNetwork.pth.tar'
path = "nma_rl_games/alpha-zero/pretrained_models/models/"
set_seed(seed=SEED)
game = OthelloGame(6)
vnet = ValueNetwork(game)
vnet.load_checkpoint(folder=path, filename=model_save_name)
Next, we can create a player that makes use of the value function to decide what best action to take next.
How do we choose the best move using our value network? We will simply compute the expected value (predicted value) of all possible moves and then select the best one based on which next state has the highest value.
class ValueBasedPlayer():
def __init__(self, game, vnet):
"""
Args:
game: OthelloGame instance
Instance of the OthelloGame class above;
vnet: Value Network instance
Instance of the Value Network class above;
Returns: Nothing
"""
self.game = game
self.vnet = vnet
def play(self, board):
"""
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
Returns:
candidates: List
Collection of tuples describing action and values of future predicted
states
"""
valids = self.game.getValidMoves(board, 1)
candidates = []
max_num_actions = 4
va = np.where(valids)[0]
va_list = va.tolist()
random.shuffle(va_list)
#################################################
## TODO for students:
# 1. Use getNextState() to obtain the next board state,
# 2. Predict the value of the next state using the value network
# 3. Add the value and action as a tuple to the candidate list, after
# reversing the sign of the value.
# Note: In zero-sum games, the players alternate turns, and the value
# function is trained from the perspective of one player (either black or
# white). To estimate the value for the other player, we need to negate the
# output of the value function.
# For example, if the value function trained for the perspective of white
# suggests a high likelihood (0.75) of winning from the current state, it
# implies that black is very unlikely (-0.75) to win from the same state. ##
# Fill out function and remove
raise NotImplementedError("Implement the value-based player")
#################################################
for a in va_list:
# Return next board state using getNextState() function
nextBoard, _ = ...
# Predict the value of next state using value network
value = ...
# Add the value and the action as a tuple to the candidate lists, note that you might need to change the sign of the value based on the player
candidates += ...
if len(candidates) == max_num_actions:
break
# Sort by the values
candidates.sort()
# Return action associated with highest value
return candidates[0][1]
# Playing games between a value-based player and a random player
set_seed(seed=SEED)
num_games = 20
player1 = ValueBasedPlayer(game, vnet).play
player2 = RandomPlayer(game).play
arena = Arena.Arena(player1, player2, game, display=OthelloGame.display)
## Uncomment the code below to check your code!
## Compute win rate for the value-based player (player 1)
# result = arena.playGames(num_games, verbose=False)
# print(f"\nNumber of games won by player1 = {result[0]}, "
# f"Number of games won by player2 = {result[1]} out of {num_games} games")
# win_rate_player1 = result[0]/num_games
# print(f"\nWin rate for player1 over 20 games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 15, Number of games won by player2 = 5 out of 20 games
Win rate for player1 over 20 games: 75.0%
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_the_Value_based_player_Excercise")
Section 3: Train a policy network from expert game data#
Time estimate: ~35 mins
Goal: Train a policy network via supervised learning / behavioural cloning.
Exercise:
Train a network to predict the next move in an expert dataset by maximizing the log likelihood of the next action.
Use a policy network to play games.
A reminder of the network architecture
Video 4: Train a policy network#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Train_a_policy_network_Video")
Section 3.1: Define the Policy network#
In section 2 we simply chose to move based on the highest predicted value of the next step. Here, we will use a different approach. We will train a network to directly produce a policy function as a distribution over all possible discrete actions, given the current state. Learning will be based on expert moves; thus, we call this behavioral cloning.
We will use the exact same network that we have used above for the value function learning. But now we will train the network explicitly on every single move of expert players.
Coding Exercise 3.1: Implement the PolicyNetwork#
For computing our objective function, we will use the negative log-likelihood of targets \(t_i\) by using the cross-entropy function:
Note: remember that the OthelloNet already returns the Log-softmax of the output from the 3rd linear layer…
class PolicyNetwork(NeuralNet):
def __init__(self, game):
"""
Args:
game: OthelloGame
Instance of the OthelloGame class
"""
self.nnet = OthelloNNet(game, args)
self.board_x, self.board_y = game.getBoardSize()
self.action_size = game.getActionSize()
self.nnet.to(args.device)
def train(self, games):
"""
Args:
games: list
List of examples where each example is of form (board, pi, v)
"""
optimizer = optim.Adam(self.nnet.parameters())
for examples in games:
for epoch in range(args.epochs):
print('EPOCH ::: ' + str(epoch + 1))
self.nnet.train()
pi_losses = []
batch_count = int(len(examples) / args.batch_size)
t = tqdm(range(batch_count), desc='Training Policy Network')
for _ in t:
sample_ids = np.random.randint(len(examples), size=args.batch_size)
boards, pis, _ = list(zip(*[examples[i] for i in sample_ids]))
boards = torch.FloatTensor(np.array(boards).astype(np.float64))
target_pis = torch.FloatTensor(np.array(pis))
# Predict
boards, target_pis = boards.contiguous().to(args.device), target_pis.contiguous().to(args.device)
#################################################
## TODO for students:
# 1. Compute the policy (pi) predicted by OthelloNNet() ##
# 2. Implement the loss_pi() function below and then use it to update the policy loss. ##
# Fill out function and remove
raise NotImplementedError("Compute the output")
#################################################
# Compute output
out_pi, _ = ...
l_pi = ...
# Record loss
pi_losses.append(l_pi.item())
t.set_postfix(Loss_pi=l_pi.item())
# Compute gradient and do SGD step
optimizer.zero_grad()
l_pi.backward()
optimizer.step()
def predict(self, board):
"""
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
Returns:
Data from the OthelloNet instance
"""
# Timing
start = time.time()
# Preparing input
board = torch.FloatTensor(board.astype(np.float64))
board = board.contiguous().to(args.device)
board = board.view(1, self.board_x, self.board_y)
self.nnet.eval()
with torch.no_grad():
pi,_ = self.nnet(board)
return torch.exp(pi).data.cpu().numpy()[0]
def loss_pi(self, targets, outputs):
"""
Calculates Negative Log Likelihood(NLL) of Targets
Args:
targets: np.ndarray
Ground Truth variables corresponding to input
outputs: np.ndarray
Predictions of Network
Returns:
Negative Log Likelihood calculated as: When training a model, we aspire to
find the minima of a loss function given a set of parameters (in a neural
network, these are the weights and biases).
Sum the loss function to all the correct classes. So, whenever the network
assigns high confidence at the correct class, the NLL is low, but when the
network assigns low confidence at the correct class, the NLL is high.
"""
#################################################
## TODO for students: Return the negative log likelihood of targets.
# For more information, here is a reference that connects the expression to
# the neg-log-prob: https://gombru.github.io/2018/05/23/cross_entropy_loss/ ##
# Fill out function and remove
raise NotImplementedError("Compute the loss")
#################################################
return ...
def save_checkpoint(self, folder='checkpoint', filename='checkpoint.pth.tar'):
save_model_checkpoint(folder, filename, self.nnet)
def load_checkpoint(self, folder='checkpoint', filename='checkpoint.pth.tar'):
load_model_checkpoint(folder, filename, self.nnet, args.device)
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_the_Policy_Network_Exercise")
Section 3.2: Train the policy network#
Important: Following cell will only train if you do not have access to the
pretrained models in the rl_for_games repository.
It will take a while to complete so we recommend using the fully trained policy
network provided in the rl_for_games repository that will be automatically
loaded later below.
if not os.listdir('nma_rl_games/alpha-zero/pretrained_models/models/'):
set_seed(seed=SEED)
game = OthelloGame(6)
pnet = PolicyNetwork(game)
pnet.train(loaded_games)
---------------------------------------------------------------------------
FileNotFoundError Traceback (most recent call last)
Cell In[38], line 1
----> 1 if not os.listdir('nma_rl_games/alpha-zero/pretrained_models/models/'):
2 set_seed(seed=SEED)
3 game = OthelloGame(6)
FileNotFoundError: [Errno 2] No such file or directory: 'nma_rl_games/alpha-zero/pretrained_models/models/'
Section 3.3: Use a trained policy network to play games#
Video 6: Play games using a policy network#
Note: in the video’s softmax function, \(T=1\) is the softmax kernel and \(z_i\) is the networks output before softmax transformation.
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Play_games_using_a_Policy_Network_Video")
Coding Exercise 3.3: Implement the PolicyBasedPlayer#
Exercise:
Use the policy network to give probabilities for the next move.
Build a player that takes the move given the maximum probability by the network.
Compare this to another player that samples moves according to the probability distribution output by the network.
First we initialize the game and load in the pre-trained policy net.
model_save_name = 'PolicyNetwork.pth.tar'
path = "nma_rl_games/alpha-zero/pretrained_models/models/"
set_seed(seed=SEED)
game = OthelloGame(6)
pnet = PolicyNetwork(game)
pnet.load_checkpoint(folder=path, filename=model_save_name)
Next we create our policy-based player by using the policy network to produce a set of action probabilities for all valid board positions.
There are at least 2 ways then to choose the next action:
Sampling-based player: we sample from the action probability distribution. This will result in actions with higher probabilities to be randomly selected more often than actions with lower probabilities.
Greedy player: we always choose the action with the highest action probability.
class PolicyBasedPlayer():
def __init__(self, game, pnet, greedy=True):
"""
Args:
game: OthelloGame instance
Instance of the OthelloGame class above;
pnet: Policy Network instance
Instance of the Policy Network class above
greedy: Boolean
If true, implement greedy approach
Else, implement random sample policy based player
"""
self.game = game
self.pnet = pnet
self.greedy = greedy
def play(self, board):
"""
Args:
board: np.ndarray
Board of size n x n [6x6 in this case]
Returns:
a: np.ndarray
If greedy, implement greedy policy player
Else, implement random sample policy based player
"""
valids = self.game.getValidMoves(board, 1)
#################################################
## TODO for students:
# 1. Compute the action probabilities using policy network pnet()
# 2. Mask invalid moves (set their action probability to 0) using valids
# variable and the action probabilites computed above.
# 3. Compute the sum over the probabilities of the valid actions and store
# them in sum_vap. ##
# Fill out function and remove
raise NotImplementedError("Define the play")
#################################################
action_probs = ...
vap = ... # Masking invalid moves
sum_vap = ...
if sum_vap > 0:
vap /= sum_vap # Renormalize
else:
# If all valid moves were masked we make all valid moves equally probable
print("All valid moves were masked, doing a workaround.")
vap = vap + valids
vap /= np.sum(vap)
if self.greedy:
# Greedy policy player
a = np.where(vap == np.max(vap))[0][0]
else:
# Sample-based policy player
a = np.random.choice(self.game.getActionSize(), p=vap)
return a
# Playing games
set_seed(seed=SEED)
num_games = 20
player1 = PolicyBasedPlayer(game, pnet, greedy=True).play
player2 = RandomPlayer(game).play
arena = Arena.Arena(player1, player2, game, display=OthelloGame.display)
## Uncomment below to test!
# result = arena.playGames(num_games, verbose=False)
# print(f"\nNumber of games won by player1 = {result[0]}, "
# f"Number of games won by player2 = {result[1]} out of {num_games} games")
# win_rate_player1 = result[0] / num_games
# print(f"\nWin rate for greedy policy player 1 (vs random player 2) over {num_games} games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 16, Number of games won by player2 = 4 out of 20 games
Win rate for greedy policy player 1 (vs random player 2) over 20 games: 80.0%
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_the_Policy_Based_Player_Exercise")
Section 4: Player comparisons#
Time estimate: ~5 mins
Next we want to compare how our different players fair, i.e. random vs. value-based vs. policy-based (greedy or sampling-based)… Feel free to explore some of the comparisons we have not explicitly provided below.
Comparing a sampling-based policy based player versus a random player#
There’s often randomness in the results as we are running the players for a low number of games (only 20 games due to compute + time costs). So, when students are running the cells they might not get the expected result. To better measure the strength of players you can run more games!
set_seed(seed=SEED)
num_games = 20
game = OthelloGame(6)
player1 = PolicyBasedPlayer(game, pnet, greedy=False).play
player2 = RandomPlayer(game).play
arena = Arena.Arena(player1, player2, game, display=OthelloGame.display)
result = arena.playGames(num_games, verbose=False)
print(f"\nNumber of games won by player1 = {result[0]}, "
f"Number of games won by player2 = {result[1]} out of {num_games} games")
win_rate_player1 = result[0]/num_games
print(f"\nWin rate for sample-based policy based player 1 (vs random player 2) over {num_games} games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 12, Number of games won by player2 = 8 out of 20 games
Win rate for sample-based policy based player 1 (vs random player 2) over 20 games: 60.0%
Compare greedy policy based player versus value based player#
Load in trained value network
Show code cell source
# @markdown Load in trained value network
model_save_name = 'ValueNetwork.pth.tar'
path = "nma_rl_games/alpha-zero/pretrained_models/models/"
set_seed(seed=SEED)
game = OthelloGame(6)
vnet = ValueNetwork(game)
vnet.load_checkpoint(folder=path, filename=model_save_name)
# Alternatively, if the downloading of trained model didn't work (will train the model)
if not os.listdir('nma_rl_games/alpha-zero/pretrained_models/models/'):
path = "nma_rl_games/alpha-zero/pretrained_models/data/"
loaded_games = loadTrainExamples(folder=path, filename='checkpoint_1.pth.tar')
set_seed(seed=SEED)
game = OthelloGame(6)
vnet = ValueNetwork(game)
vnet.train(loaded_games)
set_seed(seed=SEED)
num_games = 20
game = OthelloGame(6)
player1 = PolicyBasedPlayer(game, pnet).play
player2 = ValueBasedPlayer(game, vnet).play
arena = Arena.Arena(player1, player2, game, display=OthelloGame.display)
result = arena.playGames(num_games, verbose=False)
print(f"\nNumber of games won by player1 = {result[0]}, "
f"Number of games won by player2 = {result[1]} out of {num_games} games")
win_rate_player1 = result[0]/num_games
print(f"\nWin rate for greedy policy based player 1 (vs value based player) over {num_games} games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 7, Number of games won by player2 = 13 out of 20 games
Win rate for sample-based policy based player 1 (vs random player 2) over 20 games: 35.0%
Compare greedy policy based player versus sampling-based policy player#
set_seed(seed=SEED)
num_games = 20
game = OthelloGame(6)
player1 = PolicyBasedPlayer(game, pnet).play # greedy player
player2 = PolicyBasedPlayer(game, pnet, greedy=False).play # sample-based player
arena = Arena.Arena(player1, player2, game, display=OthelloGame.display)
result = arena.playGames(num_games, verbose=False)
print(f"\nNumber of games won by player1 = {result[0]}, "
f"Number of games won by player2 = {result[1]} out of {num_games} games")
win_rate_player1 = result[0]/num_games
print(f"\nWin rate for greedy policy player 1 (vs sample based policy player) over {num_games} games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 14, Number of games won by player2 = 6 out of 20 games
Win rate for greedy policy player 1 (vs sample based policy player) over 20 games: 70.0%
Take a few minutes to recap what the different players are with your group and how they’re choosing their actions (random player, value player, greedy policy player, sample-based policy player).
Section 5: Plan using Monte Carlo Rollouts#
Time estimate: ~35 mins
Goal: Teach the students the core idea behind using simulated rollouts to understand the future and value actions.
Exercise:
Build a loop to run Monte Carlo simulations using the policy network.
Use simulated rollouts to obtain better estimates of the value of moves.
A reminder of the network architecture
Video 7: Play using Monte-Carlo rollouts#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Play_using_Monte_Carlo_Rollouts_Video")
Load in trained value and policy networks#
Show code cell source
# @title Load in trained value and policy networks
model_save_name = 'ValueNetwork.pth.tar'
path = "nma_rl_games/alpha-zero/pretrained_models/models/"
set_seed(seed=SEED)
game = OthelloGame(6)
vnet = ValueNetwork(game)
vnet.load_checkpoint(folder=path, filename=model_save_name)
model_save_name = 'PolicyNetwork.pth.tar'
path = "nma_rl_games/alpha-zero/pretrained_models/models/"
set_seed(seed=SEED)
game = OthelloGame(6)
pnet = PolicyNetwork(game)
pnet.load_checkpoint(folder=path, filename=model_save_name)
# Alternative if the downloading of trained model didn't work (will train the model)
if not os.listdir('nma_rl_games/alpha-zero/pretrained_models/models/'):
path = "nma_rl_games/alpha-zero/pretrained_models/data/"
loaded_games = loadTrainExamples(folder=path, filename='checkpoint_1.pth.tar')
set_seed(seed=SEED)
game = OthelloGame(6)
vnet = ValueNetwork(game)
vnet.train(loaded_games)
set_seed(seed=SEED)
game = OthelloGame(6)
pnet = PolicyNetwork(game)
pnet.train(loaded_games)
Section 5.1: Define the Monte Carlo planner#
To recapitulate, the goal of the Monte Carlo algorithm here is to evaluate the outcome of different plans according to the policy used, i.e., what future Value function do we expect to end up with. So we will iterate the game forward in time (according to the game rules and with specific strategies) and return the Value function output at the end of that iteration.
Coding Exercise 5.1: Implement the MonteCarlo planner#
Here, we will first set up the Monte Carlo planner.
Note: because we will be simulating different actions into the future (planning), we want to distinguish potential board positions from actual ones that are taken. Therefore, the current (actual) position of the board that is used as a starting point for Monte-Carlo simulations will be labeled “canonical board” to avoid confusion.
class MonteCarlo():
def __init__(self, game, nnet, args):
"""
Args:
game: OthelloGame instance
Instance of the OthelloGame class above;
nnet: OthelloNet instance
Instance of the OthelloNNet class above;
args: dictionary
Instantiates number of iterations and episodes, controls temperature threshold, queue length,
arena, checkpointing, and neural network parameters:
learning-rate: 0.001, dropout: 0.3, epochs: 10, batch_size: 64,
num_channels: 512
"""
self.game = game
self.nnet = nnet
self.args = args
self.Ps = {} # Stores initial policy (returned by neural net)
self.Es = {} # Stores game.getGameEnded ended for board s
def simulate(self, canonicalBoard):
"""
Simulate one Monte Carlo rollout
Args:
canonicalBoard: np.ndarray
Canonical Board of size n x n [6x6 in this case]
Returns:
temp_v:
Terminal State
"""
s = self.game.stringRepresentation(canonicalBoard)
init_start_state = s
temp_v = 0
isfirstAction = None
current_player = -1 # opponent's turn (the agent has already taken an action before the simulation)
self.Ps[s], _ = self.nnet.predict(canonicalBoard)
for i in range(self.args.maxDepth): # maxDepth
if s not in self.Es:
self.Es[s] = self.game.getGameEnded(canonicalBoard, 1)
if self.Es[s] != 0:
# Terminal state
temp_v = self.Es[s] * current_player
break
self.Ps[s], v = self.nnet.predict(canonicalBoard)
valids = self.game.getValidMoves(canonicalBoard, 1)
self.Ps[s] = self.Ps[s] * valids # Masking invalid moves
sum_Ps_s = np.sum(self.Ps[s])
if sum_Ps_s > 0:
self.Ps[s] /= sum_Ps_s # Renormalize
else:
# If all valid moves were masked make all valid moves equally probable
# NB! All valid moves may be masked if either your NNet architecture is
# insufficient or you've get overfitting or something else.
# If you have got dozens or hundreds of these messages you should pay
# attention to your NNet and/or training process.
log.error("All valid moves were masked, doing a workaround.")
self.Ps[s] = self.Ps[s] + valids
self.Ps[s] /= np.sum(self.Ps[s])
##########################################################################
## TODO for students: Take a action according to the policy distribution.
# 1. Sample action according to the policy distribution.
# 2. Find the next state and the next player from the environment.
# 3. Get the canonical form of the next state.
# Fill out function and remove
raise NotImplementedError("Take the action, find the next state")
##########################################################################
# Choose action according to the policy distribution
a = ...
# Find the next state and the next player
next_s, next_player = self.game.getNextState(..., ..., ...)
canonicalBoard = self.game.getCanonicalForm(..., ...)
s = self.game.stringRepresentation(next_s)
current_player *= -1
# Initial policy
self.Ps[s], v = self.nnet.predict(canonicalBoard)
temp_v = v.item() * current_player
return temp_v
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Implement_the_Monte_Carlo_Planner_Exercise")
Section 5.2: Use Monte Carlo simulations to play games#
Goal: Use simple Monte Carlo planning to play games.
Video 8: Play with planning#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Play_with_planning_Video")
Coding Exercise 5.2: Monte-Carlo simulations#
Now we can run Monte-Carlo simulations. We essentially evaluate for a given action taken now what the potential future outcome will be. So we want to choose different future actions according to the policy (random vs. value-based vs. policy-based) and evaluate the outcomes. We will simulate potential future outcomes and compute their value and then average those values to get a sense of the averge value of our policy used for a given immediate (current) action. This iteration (rollout) can be expressed in the following pseudo-code:
for \(i\) in \(1\) to \(k\):
Choose the ith ranked action \(a^i\) for the current state \(s_t\) according to our specific policy function.
Run N Monte Carlo rollouts from \(s_{t+1}\) following the application of \(a^i\), \(j\) steps into the future (depth)
Average the estimated values for each rollout to get: \(V_{i}^{AVG}\)
Build an array of \([V_{i}^{AVG}, a^i]\) pairs.
To act, choose the action associated with the highest average value, i.e., \(\underset{a^i}{\operatorname{argmax}}(V_{i}^{AVG})\). We will use \(k=3\), \(j=3\) and \(N=10\).
Exercise:
Incorporate Monte Carlo simulations into an agent.
Run the resulting player versus the random, value-based, and policy-based players.
# Load MC model from the repository
mc_model_save_name = 'MC.pth.tar'
path = "nma_rl_games/alpha-zero/pretrained_models/models/"
class MonteCarloBasedPlayer():
"""
Simulate Player based on Monte Carlo Algorithm
"""
def __init__(self, game, nnet, args):
"""
Args:
game: OthelloGame instance
Instance of the OthelloGame class above;
nnet: OthelloNet instance
Instance of the OthelloNNet class above;
args: dictionary
Instantiates number of iterations and episodes, controls temperature threshold, queue length,
arena, checkpointing, and neural network parameters:
learning-rate: 0.001, dropout: 0.3, epochs: 10, batch_size: 64,
num_channels: 512
"""
self.game = game
self.nnet = nnet
self.args = args
############################################################################
## TODO for students: Instantiate the Monte Carlo class.
# Fill out function and remove
raise NotImplementedError("Use Monte Carlo!")
############################################################################
self.mc = ...
self.K = self.args.mc_topk
def play(self, canonicalBoard):
"""
Args:
canonicalBoard: np.ndarray
Canonical Board of size n x n [6x6 in this case]
Returns:
best_action: tuple
(avg_value, action) i.e., Average value associated with corresponding
action, i.e., Action with the highest topK probability
"""
self.qsa = []
s = self.game.stringRepresentation(canonicalBoard)
Ps, v = self.nnet.predict(canonicalBoard)
valids = self.game.getValidMoves(canonicalBoard, 1)
Ps = Ps * valids # Masking invalid moves
sum_Ps_s = np.sum(Ps)
if sum_Ps_s > 0:
Ps /= sum_Ps_s # Renormalize
else:
# If all valid moves were masked make all valid moves equally probable
# NB! All valid moves may be masked if either your NNet architecture is insufficient or you've get overfitting or something else.
# If you have got dozens or hundreds of these messages you should pay attention to your NNet and/or training process.
log = logging.getLogger(__name__)
log.error("All valid moves were masked, doing a workaround.")
Ps = Ps + valids
Ps /= np.sum(Ps)
num_valid_actions = np.shape(np.nonzero(Ps))[1]
if num_valid_actions < self.K:
top_k_actions = np.argpartition(Ps,-num_valid_actions)[-num_valid_actions:]
else:
top_k_actions = np.argpartition(Ps,-self.K)[-self.K:] # To get actions that belongs to top k prob
############################################################################
## TODO for students:
# 1. For each action in the top-k actions
# 2. Get the next state using getNextState() function.
# You can find the implementation of this function in Tutorial 1 in
# `OthelloGame()` class.
# 3. Get the canonical form of the getNextState().
# Fill out function and remove
raise NotImplementedError("Loop for the top actions")
############################################################################
for action in ...:
next_s, next_player = self.game.getNextState(..., ..., ...)
next_s = self.game.getCanonicalForm(..., ...)
values = []
# Do some rollouts
for rollout in range(self.args.numMCsims):
value = self.mc.simulate(next_s)
values.append(value)
# Average out values
avg_value = np.mean(values)
self.qsa.append((avg_value, action))
self.qsa.sort(key=lambda a: a[0])
self.qsa.reverse()
best_action = self.qsa[0][1]
return best_action
def getActionProb(self, canonicalBoard, temp=1):
"""
Get probabilities associated with each action
Args:
canonicalBoard: np.ndarray
Canonical Board of size n x n [6x6 in this case]
temp: Integer
Signifies if game is in terminal state
Returns:
action_probs: List
Probability associated with corresponding action
"""
if self.game.getGameEnded(canonicalBoard, 1) != 0:
return np.zeros((self.game.getActionSize()))
else:
action_probs = np.zeros((self.game.getActionSize()))
best_action = self.play(canonicalBoard)
action_probs[best_action] = 1
return action_probs
set_seed(seed=SEED)
game = OthelloGame(6)
# Run the resulting player versus the random player
rp = RandomPlayer(game).play
num_games = 20 # Feel free to change this number
n1 = NNet(game) # nNet players
n1.load_checkpoint(folder=path, filename=mc_model_save_name)
args1 = dotdict({'numMCsims': 10, 'maxRollouts':5, 'maxDepth':5, 'mc_topk': 3})
## Uncomment below to check Monte Carlo agent!
# print('\n******MC player versus random player******')
# mc1 = MonteCarloBasedPlayer(game, n1, args1)
# n1p = lambda x: np.argmax(mc1.getActionProb(x))
# arena = Arena.Arena(n1p, rp, game, display=OthelloGame.display)
# MC_result = arena.playGames(num_games, verbose=False)
# print(f"\nNumber of games won by player1 = {MC_result[0]}, "
# f"number of games won by player2 = {MC_result[1]}, out of {num_games} games")
# win_rate_player1 = MC_result[0]/num_games
# print(f"\nWin rate for player1 over {num_games} games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 19, number of games won by player2 = 1, out of 20 games
Win rate for player1 over 20 games: 95.0%
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Monte_Carlo_simulations_Exercise")
Monte-Carlo player against Value-based player#
print('\n******MC player versus value-based player******')
set_seed(seed=SEED)
vp = ValueBasedPlayer(game, vnet).play # Value-based player
arena = Arena.Arena(n1p, vp, game, display=OthelloGame.display)
MC_result = arena.playGames(num_games, verbose=False)
print(f"\nNumber of games won by player1 = {MC_result[0]}, "
f"number of games won by player2 = {MC_result[1]}, out of {num_games} games")
win_rate_player1 = MC_result[0]/num_games
print(f"\nWin rate for player1 over {num_games} games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 17, number of games won by player2 = 3, out of 20 games
Win rate for player1 over 20 games: 85.0%
Monte-Carlo player against Policy-based player#
print('\n******MC player versus policy-based player******')
set_seed(seed=SEED)
pp = PolicyBasedPlayer(game, pnet).play # Policy player
arena = Arena.Arena(n1p, pp, game, display=OthelloGame.display)
MC_result = arena.playGames(num_games, verbose=False)
print(f"\nNumber of games won by player1 = {MC_result[0]}, "
f"number of games won by player2 = {MC_result[1]}, out of {num_games} games")
win_rate_player1 = MC_result[0]/num_games
print(f"\nWin rate for player1 over {num_games} games: {round(win_rate_player1*100, 1)}%")
Number of games won by player1 = 18, number of games won by player2 = 2, out of 20 games
Win rate for player1 over 20 games: 90.0%
Section 6: Ethical aspects#
Time estimate: ~5 mins
Video 9: Unbeatable opponents#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Unbeatable_opponents_Video")
Summary#
In this tutorial, you have learned about:
the Othello game, how to implement a game loop, and create a random player.
value-based players and compared them to a random player.
policy-based players and compared them to random and value-based players.
players with Monte Carlo planner and compared them to random, value-based and policy-based players.
Video 19: Outro#
Submit your feedback#
Show code cell source
# @title Submit your feedback
content_review(f"{feedback_prefix}_Outro_Video")